Read request aggregation
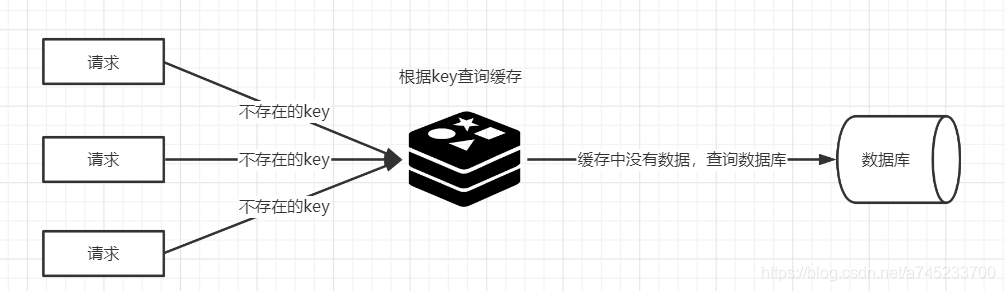
在读操作时,缓存优化是一种常见的优化手段。具体的做法是将读取的数据存储在内存中,并通过唯一的Key来索引这些数据。当读请求来到时,如果该Key在缓存中没有命中,那么就需要从后端存储(如MySql、PostgreSQL、TiDB)获取。用户请求直接穿透到后端存储,如果并发很大,这可能是一个很大的风险。
缓存击穿:某个热点的key生效,大并发集中对其进行请求,就会造成大量的请求读缓存没读到数据,从而导致高并发访问数据库,引起引起数据库压力剧增。
缓存穿透:用户请求的数据在缓存中不存在即没有命中,同时在数据库中也不存在,导致用户每次请求该数据都要去数据库中查询一遍。如果有恶意攻击者不断请求系统中不存在的数据,会导致短时间大量请求落在数据库上,造成数据库压力过大,甚至导致数据库承受不住而宕机崩溃。
缓存雪崩:在某一个时刻出现大规模的key失效,那么就会导致大量的请求打在了数据库上面,导致数据库压力巨大,如果在高并发的情况下,可能瞬间就会导致数据库宕机。这时候如果运维马上又重启数据库,马上又会有新的流量把数据库打死。
例如,对于 Key:“test”,如果缓存中没有相应的数据,并且突然出现大量并发读取请求,每个请求都会发现缓存未命中。如果这些请求全部直接访问后端存储,可能会给后端存储带来巨大压力。
为了应对这种情况,我们其实可以只允许一个读请求去后端读取数据,而其他并发请求则等待这个请求的结果。这就是读请求聚合的基本原理。
在Go语言中,可以使用singleflight 这类第三方库完成上述需求。singleflight的设计理念是“单一请求执行”,即针对同一个Key,在多个并发请求中只允许一个请求访问后端。
package main
import (
// ...
"golang.org/x/sync/singleflight"
)
func main() {
var g singleflight.Group
var wg sync.WaitGroup
// 模拟多个 goroutine 并发请求相同的资源
for i := 0; i < 5; i++ {
wg.Add(1)
go func(idx int) {
defer wg.Done()
v, err, shared := g.Do("objectkey", func() (interface{}, error) {
fmt.Printf("协程ID:%v 正在执行...\n", idx)
time.Sleep(2 * time.Second)
return "objectvalue", nil
})
if err != nil {
log.Fatalf("err:%v", err)
}
fmt.Printf("协程ID:%v 请求结果: %v, 是否共享结果: %v\n", idx, v, shared)
}(i)
}
wg.Wait()
}
在这个例子中,多个Goroutine并发地请求Key为“objectkey”的资源。通过singleflight,我们确保只有一个Goroutine去执行实际的数据加载操作,而其他请求则等待这个操作的结果。
singleflight的原理
singleflight 库提供了一个Group结构体,用于管理不同的请求,意图在内部实现聚合的效果。定义如下:
type Group struct {
mu sync.Mutex // 互斥锁,包含下面的映射表
m map[string]*call // 正在执行请求的映射表
}
Group结构的核心就是这个map结构。每个正在执行的请求被封装在 call 结构中,定义如下:
type call struct {
wg sync.WaitGroup // 用于同步并发的请求
val interface{} // 用于存放执行的结果
err error // 存放执行的结果
dups int // 用于计数聚合的请求
// ...其他字段用于处理特殊情况和提高容错性
}
Group结构的Do方法实现了聚合去重的核心逻辑,代码实现如下所示:
func (g *Group) Do(key string, fn func() (interface{}, error)) (v interface{}, err error, shared bool) {
g.mu.Lock()
if g.m == nil {
g.m = make(map[string]*call)
}
// 用 map 结构,来判断是否已经有对应 Key 正在执行的请求
if c, ok := g.m[key]; ok {
c.dups++
// 如果有对应 Key 的请求正在执行,那么等待结果即可。
g.mu.Unlock()
c.wg.Wait()
// ...
return c.val, c.err, true
}
// 创建一个代表执行请求的结构,和 Key 关联起来,存入map中
c := new(call)
c.wg.Add(1)
g.m[key] = c
g.mu.Unlock()
g.doCall(c, key, fn) // 真正执行请求
return c.val, c.err, c.dups > 0
}
func (g *Group) doCall(c *call, key string, fn func() (interface{}, error)) {
defer func() {
// ...省略异常处理
c.wg.Done()
}()
func() {
// 真正执行请求
c.val, c.err = fn()
}()
// ...
}
通过上述代码,singleflight的Group结构体利用map记录了正在执行的请求,关联了请求的Key和执行体。当新的请求到来时,先检查是否有相同Key的正在执行的请求,如果有,则等待起结果,从而避免重复执行相同的请求。
总结
核心是一个 map,只要有相同Key的读取正在执行,那么等待这份正在执行的请求的结果也是符合预期的。同步等待则用的是 sync.WaitGroup 来实现。